小惑星探査機「はやぶさ2」は、現在小惑星Ryugu(リュウグウ)に向けて順調に航行を続けています。「はやぶさ2」は、6月3日にイオンエンジンの連続運転を終了し、光学航法を用いてリュウグウへ近づいていく段階にはいりました。
小惑星探査機「はやぶさ2」の記者説明会 | ファン!ファン!JAXA!
今回の説明会では「はやぶさ2」の現在の状況、往路最後の連続運転を終了したイオンエンジンについて説明を行います。

日時
- 2018年6月7日(木)11:00~12:00

中継録画
(00:11くらいから)
配付資料とリンク
- 【PDF】2018年の小惑星リュウグウ到着にむけて小惑星探査機「はやぶさ2」の近況(http://fanfun.jaxa.jp/jaxatv/files/20180607_hayabusa2.pdf
)
- 小惑星探査機「はやぶさ2」の記者説明会 | ファン!ファン!JAXA!(http://fanfun.jaxa.jp/jaxatv/detail/12042.html
- 小惑星探査機「はやぶさ2」の記者説明会 | ファン!ファン!JAXA!(http://fanfun.jaxa.jp/jaxatv/detail/12042.html

- JAXA Hayabusa2 Project(http://www.hayabusa2.jaxa.jp/
)
- 「はやぶさ2」、小惑星リュウグウ到着の最終段階へ | 宇宙科学研究所(http://www.isas.jaxa.jp/topics/001427.html?platform=hootsuite
)



- イオンエンジン往路運転終了
- 光学電波複合航法
- 今後のスケジュール
本日の概要


ミッションの流れ概要

到着のところに日付が入った。6月27日前後予定。
1.プロジェクトの現状と全体スケジュール

2.イオンエンジン運用

1月にイオンエンジン2台から始めた。太陽から比較的離れているところから運用を始めたため。発電量が少なく3台運転ができない時期だった。
2月20日ごろ、一部3台運転が可能になるまで太陽に近づいた。ただフルパワーではなかった。推力を連続的に可変であることから少しずつ推力を上げていった。使える電力をなるべく使い切った。
最後の3~4週間は3台を10ミリニュートン(mN)という最大推力で運転。30mNに少しだけ足りないのは3台のイオンエンジンが向いている方向(ベクトル)の関係。
「動力航行」はIESを1台以上運転している状態。(←→慣性飛行)
運転時間としてははやぶさ2は6,500時間でリュウグウ到着。はやぶさでは12,000時間だった。
総力積はどのくらいの仕事をしたか。はやぶさ2の総力積ははやぶさの半分(往路分)より大きく、イオンエンジンの推力アップが効いている。
最大推力はほんの一瞬というものではなく1,024秒(約17分間)稼働したもの。

はやぶさはちょっと問題があったらまず止めた。宇宙のものは基本的に修理できないため慎重に。平均値はこの時間内に計画外停止が起きたということ。
イオンエンジンに特有の放電で計画外停止が起きる。それでもはやぶさ2は4回ですんだ。
運用の効率化。地上から見えてる時間帯だから監視しようというのは人的コストもかかる。はやぶさは毎日7~8時間追跡。1つの地上局から深宇宙探査機はこの時間見える。その間は監視した。はやぶさ2は週1日は可視時間すべて監視したがそのほかは1日4時間程度の「半パス」運用。
気付かないとき止まりっぱなしになる可能性がある。リュウグウ到着直前は1時間の停止を取り戻すために10時間かかったりする。

スイングバイ後は3つの長い期間に分けて運転した。
3.光学電波複合航法(光学航法)

今本格的に始まった。探査機から見たリュウグウの方向をもとに接近していく。光学航法だけでなく電波航法も使うため光学電波複合航法。ただ長いので通常は光学航法と。
リュウグウは地上からレーダー観測しておらず軌道の誤差が大きい。
はやぶさではDDORを本格的には使っていなかった。


↑これは昨日の早朝ONCで撮影。リュウグウはかなり明るい。露光時間が約3分と長いためスミアが出ている。

露光時間を0.09秒にすると3ピクセル。これが実際の大きさ。形はまだわからない。2,600キロメートルの距離から見てリュウグウの大きさは約0.9キロメートル。従来の予想に近い。
4.ミッションスケジュール

6月14日にも記者説明会。

5.その他(アウトリーチなど)

6.今後の予定

6月27日ごろに記者説明会(相模原キャンパスで)
参考資料






質疑応答
(32:44くらいから)
日経BPとみおか:西山さんに。イオンエンジン運用の最大推力のところ。スラスターBの最大推力が10mNではなく7.61mNになっている理由は
西山:2014年12月暮れにそれぞれのイオンエンジンの初期動作確認をしたときの数値。同じ条件でチェックしたためこのときはほかのスラスターもこの数値だった。
キセノンの流量を、最大推力を出せるよりさらに多いところから始めると推力が10mN出ていたものがカクッと落ちるところがある(ここにあるのはその数値)。地上試験の結果、長期間運転していなかったイオンエンジンはキセノンを過大な流量、小さい推力から始めると安定することがわかっていたためそういう方法でチェックアウトした。
スラスターBの運転時間は11時間。Bは初期動作チェックのあと運転していない。
ちなみにはやぶさのAは運転時間7時間。これは本当に壊れた。初期動作確認のあとイオン源に不具合が出てこうなった。
機器の接続状態として4台のうち3台に直流電源を接続できる。1つは予備という考え。スラスターと電源はあらゆる組み合わせができるようにしておくと、どこが壊れても生き残ることができるが探査機が重くなる。組み合わせも割り切りをして、電源1~3の3つに。電源1はスラスターAとBを担当でき、電源2はBとC、電源3はCとDを担当。(確率は低いが)電源1が壊れるとスラスターAを運転できなくなる。組み合わせ上、AとDを優先して運転するのがよい(=BとCは電源に冗長性があるため温存したい、AとDは先に壊れてもよいと考える)。そのためスラスター2台運転ではAとDを使う。
3台運転のときどうするか。スラスターAとDに加えてBとCどちらを使うか。(はやぶさ2は太陽電池パネルを太陽に向けており)太陽から離れているスラスターCの方が温度が低く、燃費がややよくなる。有利なものを使おうということでCを使った。気まぐれにBを運転することもできるが、はやぶさ2はイオンエンジンの実験ミッションではなくリュウグウに到達するのがミッション。そのためBは使わなかった。
イオンエンジン担当としては4つのエンジンすべての特性を知りたいが、Bを使わざるを得ない状況にならないようにしつつ地球帰還させたい。
共同通信すえ:吉川さんに。リュウグウの姿がわかってくるのはいつごろ?
吉川:来週1週間で10数ピクセルくらいになる。形がわかってくるかも。2週間後には100ピクセルを超えてくるのでかなり形がわかるだろう。
すえ:イオンエンジン運転を前倒しで終了できた理由は
吉川:最後のイオンエンジン運用が順調だった。マージンを使わずにすんだ。
時事通信かんだ:西山さんに。はやぶさのときはイオンエンジンそれぞれにくせがあったようだが今回安定していたことが運用に与えた影響は
西山:運用の改善に役立っている。初号機は1つ1つのスラスターを寸法調整を個別に行っている。寸法形状はばらばら。特性を合わせようとしたが経年での変化のしかたはそれぞれ違った。
はやぶさ2は各イオンエンジンの特性が揃うようにしたいと切望していた。寸法に関しては機械加工の精度の範囲ではまったく同一。どの部品が性能に与える感度が高いのかもわかってきた。初号機に比べるとだいぶ整った特性になっている。安全のための設定のさじ加減で我々の経験値が増えたこともある。はやぶさに比べて安全係数をゆるめにできた。その上で望んでいないタイミングで止まってしまうということは避けられた。
性能を揃えるのは今後とも取り組んでいきたい。
かんだ:性能が揃ったことが効率アップに寄与した?
西山:そうですね。監視の値も各スラスターで共通の数値をあてはめている。
赤旗新聞なかむら:到着予定の誤差はどのくらい縮まった?
吉川:11ページ参照。STTで誤差が半分(100キロ強)に。12ページ。リュウグウを中心に写すつもりで撮影計画を立てたがこのようにずれている。このずれの距離は約70~80キロ。我々が思っているリュウグウと探査機の位置関係の誤差がずれとして出ている。今後これを縮めていく。
なかむら:LIDARを使えるのはリュウグウまでどのくらい近づいてから?
吉川:LIDARは距離25キロメートルくらいから使える。到着直前までは光学航法。到着時の距離は20キロ。
なかむら:6月3日からの接近誘導では化学エンジンを使う?
吉川:その通り。
なかむら:これからなにが山場? また抱負を
吉川:精密な誘導が必要。光学航法をいかに正確に行えるかがカギ。またリュウグウに衛星がないかこれから確認していく。広い範囲を撮影してリュウグウのほかに移動天体がないか確認する。たぶんないだろうが心配はしていて、もしあると運用に大きな影響がある。
抱負としては是が非でもリュウグウをちゃんと見たいので全力で取り組む。
ライターあらふね:動力航行の時間がはやぶさより短くなった。推力アップや軌道の違いのほかに要因はあるか
西山:打ち上げロケットの違い(M-VとH-IIA)がある。地球離脱時の速度が大きく違う。地球スイングバイまでのイオンエンジン運転が非常に短い。初号機は最初の1年間で5,000時間運転した。イオンエンジン担当としては楽をさせてもらった。
あらふね:運用時間の削減について
西山:安定しているので削減できた。心配ならコストどうこう言わず監視する。大丈夫だと言うことで効率化していった。
あらふね:それはいつごろ決まってきたか
西山:地球スイングバイまででおおむね見極めができてきた。順調に推移した。
あらふね:リュウグウを電波観測しなかった理由は
吉川:レーダー観測はゴールドストーン局から電波を当ててアレシボで受けた。イトカワははやぶさの目標と決まってから地球に接近するタイミングがあった。リュウグウは決まってから地球に接近しなかったためレーダー観測できなかった。
毎日新聞永山:西山さんに。往路完走できたことへの率直な感想。自信はあったか。その理由、勝因は
西山:自信はあった。冷静な気持ちで、当然できるだろうと思っていた。はやぶさの不具合は絶対に直す。時間が限られた中とことんやりつくした。
はやぶさは中和器に不具合が出て壊れたり推力低下があった。中和器の耐久性確保がカギだった。はやぶさ2のミッションではイオンエンジンは1万時間の運転とわかっていたため、打ち上げまで2万時間の耐久テストをと考えてうまくいっていた。耐久テストはいまも続いていて48,000時間まで来ている。実験室でこれだけテストできているものを実戦で1万時間というならもう大丈夫。
宇宙作家クラブ上坂([twitter:@kawauso_twi]):ONC-Tの視野角について。12ページとうしろのページで記載が違う理由は。リモートセンシングの映像を作ったとき6.35度の正方形と聞いた。12ページでは6.3度×6.5度角。どうして?
吉川:これはどうしてだろう。のちほどお答えします。
産経新聞くさか:予習したい。20キロに到着してからの運用について。どのように化学エンジンを使うのかなど
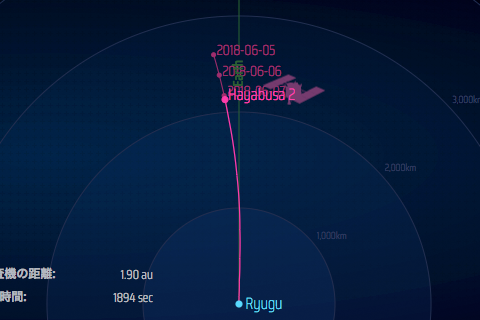
吉川:次回資料を作ります。簡単にははやぶさ2のWebのトップで見られる。これは画面上方が地球で、リュウグウを固定した座標系。光学航法はリュウグウを背景の星に対して見て近づいていく。そのため微妙にジグザグしつつ近づいていく。適宜確認しながら接近。20キロでスラスターを噴いて相対速度をリュウグウに揃える。すると地上から見たとき視線方向の速度が同じになる。またLIDARで距離も測る。それが到着ということ。
くさか:リュウグウがどのような星であるかという暫定の想定を知りたい
吉川:24ページ参照。自転軸の傾きが重要。垂直ではない。自転軸の傾きと接近方向によって見えない範囲がどのくらいになるかが決まる。
ライター喜多:西山先生に。リュウグウに到着してしまったのでIESチームは仕事がなくなる。滞在期間中の仕事は次のイオンエンジンの研究開発と思うが抱負を
西山:抱負の前にまずはやぶさ2の運用から手を引くということはなく、特に若手はスーパーバイザーとして専門でなくても運用チームに組み込まれている。
そのうえで将来のミッションに向けて発展させていく。はやぶさ2の飛行中から手をこまねいているわけではなく課題に日々取り組んでいる。研究をリュウグウ観測期間中も行い、なるべく早く次のフライト機会を手にしたい。いくつか検討・提案中。はやぶさ2のイオンエンジンを改良したり大胆に仕様変更したものなどで宇宙科学のさまざまなミッションに貢献していきたい。
なるべく早く次の飛行機会を得るのが当面の目標。
ニッポン放送はたなか:リュウグウの衛星について。あるとすると衝突や軌道修正の可能性がある? ないとわかるのはいつ?
吉川:衛星があるとはやぶさ2に衝突しないようにしなければならないため運用に影響が出る。はやぶさのときもイトカワの周囲に衛星があるか気にしていて写真を撮って確認した。撮影した範囲ではないだろうとわかるが実際問題絶対にないとは言い切れない。
ナビゲーションのための撮影や探査は行うが危険な天体がないか常に気にしつつ進める。
テレビ朝日さとう:計画全体の中でどういう時期に当たるか
吉川:いよいよミッションの本番にさしかかった。打ち上げから3年半ほど地球スイングバイ、イオンエンジンなどあったがはやぶさ2の目的はリュウグウの探査。ローバーやランダーを下ろしタッチダウンもする。それがようやく始まる。これからが本番。
さとう:この時期は緊張する時期?
吉川:その通り。ちゃんとたどり着けるかということ、リュウグウがどういうものかまだわかっていない。はっきりした時点で計画を作る。半分ワクワクしつつ半分は緊張している。相手がどういうものかによって対応策を考えなければならない。
(以上)